
The robot arm project was part of a Mechatronics class I took, MECH 44 Mechatronics Processes and Materials. I learned a great deal in this class about metals and their various properties. During this course I was introduced to the use of the mill and lathe. I learned about other industrial fundamental topics such as bearings, springs, threads, reading engineering drawings and a lot more. The class took a hands-on approach to learning which allowed plenty of room for error. After a few tester projects, the focus was shifted towards the robot arm project.
We were given the plans to build the robot arm with the option to add any modifications we wanted. Since I was sitting in the back row with a group of guys that were quite experienced I felt pressured to go above and beyond the normal plans with some girly flare. When I first was approaching this problem I had no clue how I was going to pull that off. After going through previous year’s designs I decided I wanted to go for a cleaner overall packaging by sandwiching the air tank in between two pieces or acrylic. This is where I should have built a model in Solidworks, but there was the whole issue of limited time and me not being a master at Solidworks. And besides I had all these napkin sketches. So I ordered a tapered roller bearing washer that was pretty awesome looking, while telling myself I would figure out how to integrate it in the near future.
The fabrication process was broken down into multiple sections. This was probably the most intense portion of the projects, as I had never had to do such precise fabrications in a shop with such nice tools.
Cutting the acrylic was relatively easy using a horizontal mill at a higher speed once the acrylic/mill bit heated up. I then hand filed the edges which allowed for the air tank to sit snugly in between the two pieces of acrylic.
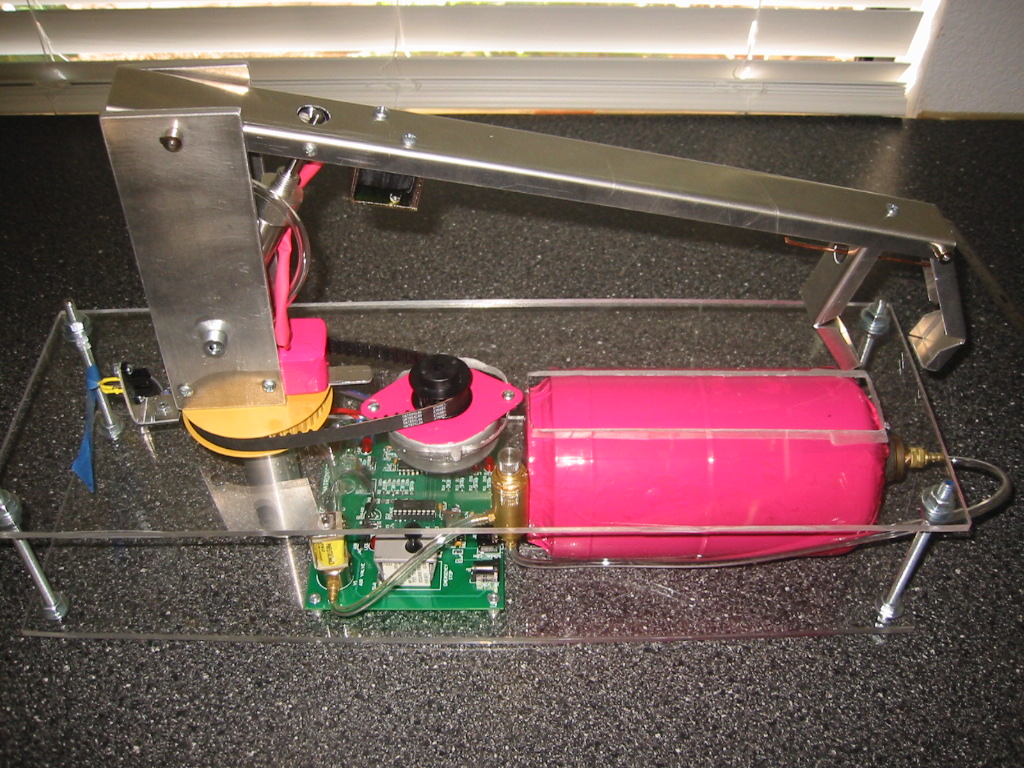
The air tank is just an old propane cylinder that was completely drained of propane. The schrader valve that it came with was drilled out and replaced with a threaded schrader steam which accommodates refilling with a conventional schrader-headed air hose. The pink vinyl was easy to apply with a second set of hands to help me stretch it while wrapping the air tank.
Most of the redesigns were done on the fly while fabricating, as I am really a hands-on type of person. On one level I need to be able to see how it looks and interacts to effectively create, while my logical side knows that design reviews across multiple iterations.
On the day that the project was due I was the last person to leave that night as I wanted it to work so bad. When I had milled the aluminum shaft for the brass journal located in the wooden base, I made the shaft to short and the whole aluminum on brass action. My own misjudgement had caused the error, which could have been fixed by using the lathe to mill a piece of steel and a recession into the aluminum base to a deeper depth to support the lateral weight of the robot arm. Or milled a larger aluminum base to house the tapered roller bearing and then used the original aluminum base set into the inside of the bearing.
Overall I am satisfied with the result aesthetically, but on a functional level it was a failure. The fact that I waited until the last moment to deal with the rotating axis which bears the majority of the load was my undoing. If I would have had more time to iterate through at least one more design that was taller/deeper I know I could have obtained a full 360 degree control.